Para quem não sabe, os tais Servos que tanto falamos em aeromodelismo são os responsáveis por movimentar as superfícies de controle de um modelo: aileron, profundor, leme, etc
Amplamente usado hoje em dia o servo surgiu de uma nescessidade de se movimentar alguma coisa de forma precisa e controlada. Clique em leia mais.....
A caracteristica mais marcante de um servo é a sua capacidade de movimentar o seu braço até uma posição e mantelo lá, mesmo que este seja forçado em outra direção.
-E como ele faz isso? Como ele sabe onde o braço deve parar?
Para entendermos melhor o servo, temos que olha-lo por dentro. Para que vocês não precisem abrir o servo de vocês, acompanhem as figuras abaixo.
Servo_Breakdown
Nesta figura podemos ver as partes que compoem um servo.
-Control Cicuit - Circuito de Controle = Responsável por receber os sinais e energia do receptor, monitorar a posição do potenciometro e contolar o motor de acordo com o sinal do receptor e a posição do potenciometro.
-Potenciometer - Potenciometro = Ligado ao eixo de saida do servo, monitora a posição do mesmo.
-Motor = Movimenta as engrenagens e o eixo principal do servo.
-Drive Gears - Engrenagens = Reduzem a rotação do motor,transferem mais força ao eixo principal de saida e movimentam o potenciometro junto com o eixo.
-Servo Case - Caixa do servo
Note nas figuras acima, como o motor e o potenciometro são conectado as engrenagens.
Para fazer um servo funcionar você deve liga-lo a um receptor ( RX ) e este receptor deve estar ligado a uma bateria que forneça no mínimo 4,8volts ( não discutiremos aqui uma ligação com Speed Control ). Este receptor deve estar sintonizado a um rádio ( TX ). Em geral um receptor para um aeromodelo elétrico deve ter no mínimo 3 canais ( sendo mais comum encontrarmos os receptores de 4 canais ), mas para os aeromodelos mais simples usamos só 2 servos. Cada servo é ligado a um canal diferente do receptor e recebe um sinal no formato PWM ( Pulse Width Modulation ). Este sinal pode ter 0Volts ou 5Volts. O circuito de controle do servo fica monitorando este sinal em intervalos de 20ms ( mili segundos ), se dentro deste intervalo ele percebe uma alteração do sinal de 0v para 5v durante 1ms até 2ms ele altera a posição do seu eixo para coincidir com o sinal que recebeu.
periodo20ms
Um sinal de 1ms corresponde a uma posição do braço do servo todo a esquerda ou 0º
Um sinal de 1,5ms é o que chamamos de posição central do servo ou 90º
Um sinal de 2ms corresponde a uma posição do braço do servo todo a direita ou 180º
pulso
Uma vez que o servo recebe um sinal de 1,5ms ( por exemplo ), ele verifica se o potenciometro encontra-se na posição correspondene, se estiver ele não faz nada. Se o potenciometro nao estiver na posição correspondente ao sinal recebido, o circuito de controle aciona o motor até o potenciometro estar na posição certa. A direção de rotação do motor do servo vai depender também da posição do potenciometro, o motor vai girar na direção que mais rápido levar o potenciometro até a posição certa.
Se tentarmos alterar a posição do braço do servo a força, veremos que ele faz uma resistência e tenta manter a posição que lhe foi designada pelo sinal que recebeu. Ele faz isto por que o potenciometro esta conectado diretamente ao eixo de saida, e detecta qualquer alteração na posição do mesmo. E é isto que faz o servo ser tão importante para nós. Quando mandamos ele ir para uma posição ele vai e fica lá até receber outra "ordem".
Esta "resistência" que o servo faz a uma mudança a força da posição do seu braço, chamamos de Torque. O Torque é a principal característica de um servo. Medimos o torque em kg-cm ( Kilo gramas por centímetro ) ou oz-in ( Onças por polegadas ). Mas o que significa isso? Veja a figura abaixo:
braco-de-forca-servo
Considere que o braço deste servo tem 1cm até o ponto onde é conectado ao peso, e o peso é de 1Kg. O servo consegue manter a posição do seu braço mesmo com o peso puxando p/ baixo sem ceder nem quebrar. Podemos dizer que este servo tem um torque de 1 kg-cm ou 14 oz-in.
Se excedermos estes limites provavelmente o servo vai quebrar suas engrenagens. A maioria dos fabricantes de servos vendem conjuntos de engrenagens extras se isto acontecer. Se você precisa de mais força e resistência, pode usar um servo que chamamos de Metal-Gear ou com engrenagens de metal.
servo-metalgear
O problema com os servos Metal-Gear é o seu peso e custo. Seria ótimo se todos os servos fossem metal-gear, mas como eles ficam mais pesados não são adequados a todos os modelos.
Outra caracteristia dos servos é sua velocidade, medida em sec/60º . Ou seja quantos segundos ( ou fração ) ele leva para gira 60º. Em geral não prestamos muita atenção a esta caracteristica, só os competidores levam ela em consideração.
Servos-tamanhos
Os servos em geral são classificados em categorias, as que em geral nós do mundo dos elétricos usamos são:
-Standard = São os servos mais comuns. Grandes e robustos, pesam em torno de 35gramas. São usados em geral em modelos com envergadura de 1,20m ou mais, onde se nescesita de um peso extra para se atingir o CG ideal. São os que usamos em nossas Asas Elétricas.
-Mini = São menores que os Standard pesando algo entre 20 e 28 gramas. Não são tão usados assim pois podem ser facilmente substituidos por um servo micro.
-Micro = Eu diria que são os mais usados em aeromodelos elétricos. Pequenos, leves e com um bom torque. Podem variar desde 6 até 20 gramas.
-Pico = Embora não sejam os menores servos, estão bem próximos. Usados em modelos pequenos para vôo indor, ou onde levesa é fundamental.
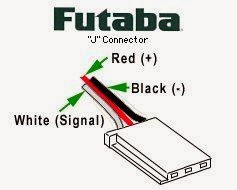
Podemos dizer que todos os fabricantes de servos com exceção da Airtronics respeitam um padrão de conexão. Então você pode usar um servo Hitec num receptor Futaba, um servo Futaba num receptor JR, etc. Embora a pinagem da conexão seja a mesma o chanfro do conector pode variar um pouco, mas nada que impeça você de conecta-lo. Existem diversos fabricantes de servos hoje em dia 90% dos casos eles usam o padrão da Futaba.
















Nenhum comentário:
Postar um comentário